 ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)
ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)Vamos começar com um dos meus filmes preferidos de todos os tempos: Metrópolis (Metropolis, dir. Fritz Lang, 1927)!
Androides (robôs) e ciborgues acabam por se confundir, às vezes. Nem sempre é clara a divisão entre ambos. Geralmente, é tido que os robôs não possuem propriedades orgânicas (ao contrário dos ciborgues). Aproveitando a aula anterior, vamos utilizar aquela definição de robô neste curso, ou seja, máquinas sem suporte orgânico humano. Isso, não impede, contudo, que os robôs sejam feitos à imagem dos homens! Muitos robôs possuem braços e pernas e, principalmente, são utilizados para substituir-nos em algumas de nossas tarefas, como podemos deduzir no filme Blade Runner (dir. Ridley Scott, 1982):
Um dos primeiros autômatos registrados pertence à mitologia grega. Em sua obra Biblioteca, Apolodoro descreve brevemente um autômato de bronze chamado Talos que atuava como guardião em Creta (Livro I, capítulo 9, seção 26):
“Colocando o mar a partir daí, eles [os argonautas de Jasão] foram impedidos de tocar em Creta por Talos. Alguns dizem que ele era um homem da raça de Bronze; outros, que ele foi dado a Minos por Hefesto; ele era um homem de bronze, mas alguns dizem que ele era um touro. Ele tinha uma única veia que se estendia de seu pescoço aos tornozelos, e uma cavilha de bronze ao final da veia. Este Talos manteve a guarda, rondando a ilha três vezes todos os dias; por isso, quando viu o Argo de pé na costa, ele o atacou, como de costume, com pedras. Sua morte foi provocada pelas artimanhas de Medéia, talvez o drogando, ou, como outros dizem, prometendo torná-lo imortal e depois arrancando-lhe a cavilha da veia, de modo que todo o ichor jorrou e ele morreu. Mas alguns dizem que Poias o matou atirando em seu tornozelo”.

 com a imagem de Talos. In: https://en.wikipedia.org/wiki/Talos#/media/File:Didrachm_Phaistos_obverse_CdM.jpg")
Abaixo, um trecho do excelente filme Jasão e o Velo de Ouro (Jason and the Argonauts), de 1963, com animação em stop motion do mestre Ray Harryhausen.
<Acréscimo versão 2019>
A figura de Talos na mitologia grega fornece uma boa discussão sobre o seguinte tópico: ele era um robô ou não? Segundo a historiadora Adrienne Mayor em seu livro Gods and Robots: Myths, Machines, and Ancient Dreams of Technology (2018), Talos ainda gera discussão entre os especialistas. É quase senso comum os robôs serem vistos como seres feitos, não nascidos (made, not born), ou seja, não são naturais pois foram criados por alguém ao invés de terem sido dados à luz por meio de gestação: os deuses do Olimpo, por exemplo, eram nascidos, não feitos (born, not made), aproximando-se, então dos mortais que habitavam a Terra.
Como podemos notar no trecho acima de Apolodoro, Talos foi feito por Hefesto e, por isso, se enquadraria no quesito de autômato puro, pois, como vimos na aula passada sobre Robótica, os robôs precisam se enquadrar nos quesitos de independência (ou seja, movimentar-se livres de cabos e fios) e usam sensores para interagir dentro de um mundo físico. Talos era assim também: ele possuía meios de se locomover sozinho, seus sensores (olhos) viam os inimigos que se aproximavam de Creta e, assim sendo, agia no ambiente para barrar a passagem deles. Talos é um robô, correto?
Mmmm… continuando no texto de Apolodoro, a coisa complica quando chegamos na parte da veia que atravessa todo o seu corpo e está repleta de icor. Os gregos antigos acreditavam que o sangue dos deuses – e também dos mortais – era um fluido que auxiliava na vida, denominado icor. Talos tinha icor em sua veia e, por isso, a estratégia dos argonautas foi a de sangrá-lo até a morte cortando a veia em seu tornozelo. Podemos apontar duas coisas interessantes aqui: 1) o fato de icor correr pela veia de Talos o difere de uma matéria inanimada: ele não é puramente um autômato vazio, é algo mais; 2) o corte realizado na veia na altura do tornozelo de Talos demonstra uma prática que os gregos faziam na Medicina: sangrias (inclusive, sabiam muito bem que, se deixar sangrar demais a veia do tornozelo, a pessoa morreria). É interessante notar que a abertura no tornozelo de Talos seria o equivalente do orifício de respiro de uma peça de bronze produzida por meio da técnica da cera perdida: tal como o bronze escorre por esse duto, o icor de Talos se esvai. Talos, então, é uma peça de bronze no sentido técnico, mas imbuído de vida.
Desse modo, Talos se assemelha aos humanos. E ele também emula os humanos: o modo de Talos enfrentar seus inimigos era abraçá-los e forçá-los contra o seu corpo de bronze que, para se defender, aquecia-se graças ao icor presente dentro dele, queimando os desafetos. Assim, Talos, na mitologia grega, poderia ser visto como uma amálgama entre homem e máquina/autômato/ser mecânico. Na concepção atual, Talos poderia, também, ser visto como um ciborgue.
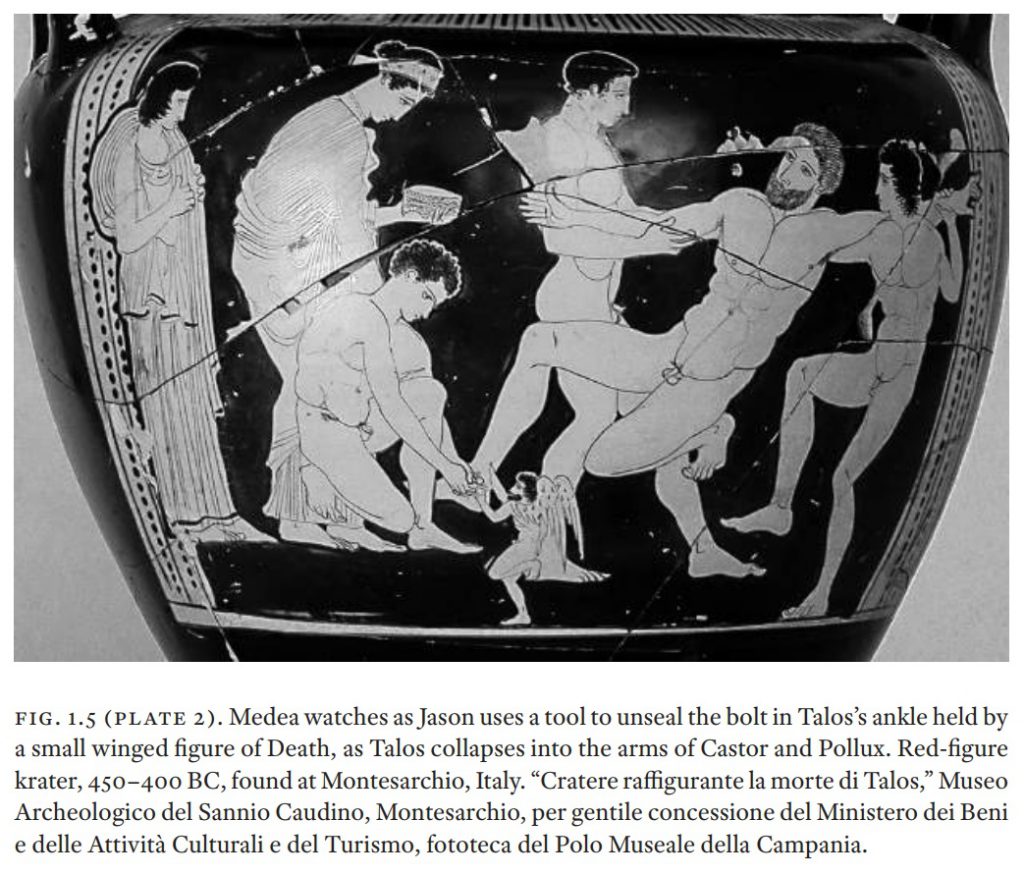
Morte de Talos. In: Adrienne Mayor, Gods and Robots: Myths, Machines, and Ancient Dreams of Technology, 2018.
</Acréscimo versão 2019>
No século XVIII, os autômatos fizeram parte não só do imaginário humano, mas, também, foram postos em prática. Principalmente através das mãos habilidosas do inventor francês Jacques de Vaucanson:
https://www.youtube.com/watch?v=_qdOghUpgDk
Nessa aula, iremos um pouco além. Vamos falar da junção, de fato, dos homens com as máquinas. Iremos conversar sobre ciborgues!
Embora as discussões sobre o tema tenham surgido ainda na década de 1940, foi nos anos 1960 que a ideia de máquinas e organismos interagindo em novas formas ganhou fôlego. As máquinas podiam ser vistas de duas formas:
1) ciborgues (cybernetic organism, organismo cibernético) – máquina como parte dos organismos biológicos existentes, ou seja, a modificação maquinária podia ajudar um animal (e homens) a sobreviver e a operar em ambientes hostis, tais como espaço sideral e profundezas de oceanos;
2) máquinas vivas sem base orgânica – máquinas sem tecidos com características de seres vivos, ou seja, com habilidade para reprodução, mutação, evolução, e pensamento.
Algumas das questões sobre máquinas como seres vivos foram discutidas entre Wiener e John von Neumann na década de 1940, enquanto Neumann trabalhava no ENIAC (Eletronic Numerical Integrator and Calculator) dentro da Universidade da Pensilvânia. Por volta de 1946, Neumann sentiu que o cérebro humano era simplesmente muito complexo para ser estudado como um modelo para computadores: ele sugeriu que era necessário estudar seres mais simples, como os vírus. Em uma série de palestras intitulada Theory of Self-Reproducing Automata (publicadas em 1966), Neumann deliberadamente pulou de uma descrição das máquinas em termos orgânicos para uma descrição de seres vivos em termos mecânicos. Porém, para ele, a reprodução, de um ponto de vista mecânico, levava a uma conclusão oposta: auto reprodução orgânica era evolutiva; auto reprodução mecânica era degenerativa: uma máquina elaborada para fazer outras máquinas deve conter seus próprios componentes, o design da nova máquina, e as partes e ferramentas para montar a nova máquina, ou seja, a máquina “pai” era construída para ser mais complexa do que a máquina “filho”. Segundo Neumann, para uma máquina poder construir outra de mesma complexidade, ela teria de ter as seguintes partes: órgão estimulante, órgão de fusão (para soldar as partes), órgão de cortes (para dessoldar partes), e um músculo para produzir movimentação.
J. C. R. Licklider, cientista da computação estadunidense e um dos pioneiros da internet, via os problemas de comando e controle como essencialmente problemas de interação homem-computador. Licklider não queria delegar cada vez mais decisões autoritárias às máquinas: para ele, homem e máquina não estavam em competição – eles complementavam um ao outro, gerando uma simbiose homem-máquina (ideia articulada no artigo Man-Computer Symbiosis, de 1960), tornando humanos e computadores estreitamente ligados. Contudo, três problemas tinham de ser resolvidos para a simbiose acontecer:
1) compartilhamento de tempo – divisão de recursos de processamento de supercomputadores caros entre um número de usuários humanos;
2) aperfeiçoamento das limitações das interfaces input-output dos computadores;
3) velocidade de armazenamento e acesso a grandes quantidades de dados e informações – para Licklider, interfaces gráficas e reconhecimento de voz seriam altamente desejáveis.
Em 1962, Licklider começou a trabalhar na Pentagon’s Advanced Research Projects Agency (ARPA), continuando seu trabalho de aperfeiçoamento da comunicação homem-máquina: para ele, a única solução era uma rede de computadores interligados (algo que só foi realizado quase 20 anos após, com a internet).
O primeiro ciborgue, contudo, nasceu em maio de 1960, no Texas, no hospital da Randolph Air Force Base como um desafio para voar em novas altitudes. O doutor Nathan Kline e o engenheiro Manfred Clynes publicaram um artigo intitulado Drugs, Space and Cybernetics: Evolution to Cyborgs nesse ano sobre a teoria do controle automático de sistemas ao corpo humano (ciborgue). A ideia básica do ciborgue era intuitiva: na Terra, a maioria das funções regulatórias do corpo funcionam (não temos de lembrar de ajustar nossa pressão sanguínea ou como respirar) – o objetivo, então, era emular esse comportamento automático e inconsciente no espaço sideral, liberando, assim, o astronauta das limitações do corpo humano. Para tanto, podiam ser implantados organismos artificiais no corpo humano para regular os inputs, e drogas podiam ser injetadas para auxiliar na regulagem. As ideias, contudo, não deixaram o papel, mesmo com a NASA (fundada em 1958) levando em consideração tais estudos.
O ciborgue, contudo, não possuía usos apenas no espaço. Na Terra, os militares também começaram a pesquisar o assunto. Ralph Mosher, engenheiro da General Electric, conseguiu milhões de dólares em financiamentos para a junção homem-máquina trabalhando para as Forças Armadas estadunidenses. Para Mosher, faltava algo relevante na relação com as máquinas: o feedback. Ele entendeu que o sentido cinestésico das forças dos ossos e músculos importava – isso gerava uma máquina cibernética antropomorfa (cybernetic anthropomorphus machine, CAM). Mosher chamou sua primeira CAM de Handyman: formada por um par de poderosos braços mecânicos, ligeiramente maiores do que os humanos, mas com estrutura similar (juntas de cotovelos e garras de dois dedos), que podiam efetuar 10 movimentos em um espaço tridimensional – essas ferramentas ficavam em uma caixa preta na frente do aparato e eram alimentadas por cabos hidráulicos. As garras hidráulicas imitavam as ações dos braços e mãos de um homem, e ele, em contrapartida, sentia o feedback das garras por meio de sensores. Com a Guerra do Vietnã, Mosher pôde trabalhar junto ao exército na construção de CAMs para caminharem nos ambientes hostis das selvas. Em 1964, o Pedipulator (ver vídeo abaixo) foi construído: a máquina bípede parecia um AT-ST do filme Star Wars – uma cabine com uma grande janela frontal sustentada sobre duas pernas finas com quase 6 metros de altura. Para Mosher, os mecanismos cibernéticos tinham grande vantagem sobre os veículos convencionais: uma integração efetiva homem-máquina eliminava alavancas e pedais de freio, fazia a programação ser obsoleta, requeria pouco treino, seu feedback de força reduzia riscos, e máquinas cibernéticas podiam deixar os operadores livres para focar nos problemas que se apresentassem. Embora impressionasse as Forças Armadas, o Pedipulator gerou a preocupação sobre como ele se colocaria de pé caso caísse no terreno: a solução, então, foi desenvolver uma máquina quadrúpede – porém, ele se mostrou bastante difícil de ser controlado pelos operadores mesmo após treinamento. Somente uma máquina caminhante cibernética foi construída para o exército antes de o programa ser descontinuado. Para Mosher, havia uma diferença sutil entre controle humano e controle automático: uma simples pá usada em jardinagem era uma CAM pois estendia o corpo humano e seus sentidos e podia ser usada sem treinamento, tornando-se parte do corpo do operador (pois, ao contrário de um guindaste, a pá fornecia sentido de força, superfície, posição, velocidade e direção).
Em novembro de 1965, a GE lançou um exoesqueleto completamente funcional para cargas pesadas muito semelhante ao que James Cameron apresentaria no filme Aliens, em 1986. Denominado Hardiman (“man” sendo abreviação de “manipulator”), ele foi construído a fim de lidar com cargas pesadas em situações extremas: carregamento de bombas em asas de aviões de caça, construção subaquática, e trabalho manual em viagens no espaço. O Hardiman, contudo, teve o projeto cancelado em 1968 porque os militares não estavam convencidos de sua viabilidade. Mosher, porém, nessa época já dizia que não era necessário ter um operador dentro da CAM: o aparato podia ser controlado remotamente.

Desse modo, vimos que ciborgues são uma realidade e, se for adepto das ideias de Donna Haraway (A Cyborg Manifest, 1985), você também é um ciborgue: a utilização de ferramentas estende a nossa capacidade de atuação no mundo e, também, utilizamos máquinas cibernéticas em nosso cotidiano, em uma simbiose. É uma visão um pouco diferente daquelas encontradas em filmes ou obras de ficção científica, não é? Por exemplo, os borgs do Star Trek: a Nova Geração não são bem aquilo que foi mostrado aqui:
<Acréscimo versão 2019>
Aposto que bateu curiosidade para saber como são os ciborgues do século XXI, não foi? Esse vídeo do The Guardian é incrível! Recomendo vê-lo inteiro:
</Acréscimo versão 2019>
Leitura recomendada
› RID, Thomas. Rise of the machines. A cybernetic history. New York: W. W. Norton & Company, Inc., 2016.
O capítulo 4, intitulado “Organims”, oferece um panorama sobre o ciborguismo e foi usado de base para essa aula.
 Loading...
Loading...
› MAYOR, Adrienne. Gods and Robots: Myths, Machines, and Ancient Dreams of Technology, 2018.
A Introdução e o primeiro capítulo são realmente interessantes para se ter uma ideia de como os mitos antigos podem se relacionar com nossas ideias de robôs e ciborgues.
Loading...
› NEUMANN, Jon von. Theory of self-reproducing automata. Urbana/London: University of Illinois Press, 1966.
A série de palestras de Neumann sobre a reprodução das máquinas. Pesadão.
Loading...
› CLYNES, Manfred E. & KLINE, Nathan S. “Cyborgs and space”. In: Astronautics, september, 1960.
O famoso artigo sobre a invenção do ciborgue.
Loading...
› LICKLIDER, J. C. R. “Man-computer symbiosis”. In: IRE Transactions on Human Factors in Electronics (1), 1960 , pp. 4-11.
Artigo curto e excelente de Licklider sobre a simbiose homem-máquina. Fundamental.
Loading...
› KLINE, Ronald. “Where are the cyborgs in cybernetics?”. In: Social Studies in Science (39), 2009 , pp. 331-362.
Esse não é o Kline do artigo clássico de 1960. Nesse texto, há um apanhado da história do ciborguismo e seus estudos atuais.
Loading...
Jogo recomendado
Jogos com ciborgues são muitos. Um dos mais divertidos, porém, é o Far Cry 3: Blood Dragon, lançado pela Ubisoft em 2013. Você é um soldado com implantes que precisa destruir tudo pelo caminho (o clima de anos 80 é memorável!). Um dos melhores jogos que já experienciei.
Você pode adquirir na Steam: Acesse.
Filme recomendado
Ghost in the Shell (1995) é a adaptação do mangá de Shirow Masamune. Nem vou falar mais nada.
Powerpoint da aula
Aposto que a aula foi tão boa que até se esqueceu de fazer anotações, não é mesmo? Sem problemas!
Clique aqui para baixar o PPT: Download da aula.

Este trabalho está licenciado com uma Licença Creative Commons – Atribuição-NãoComercial 4.0 Internacional.