 ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)
ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)Antes de prosseguirmos, uma música para relaxar:
Chegamos à era da automação. Ela foi liderada pela Cibernética, e muitos pesquisadores pioneiros estiveram envolvidos na construção de máquinas automatizadas/autônomas.
Os robôs como os conhecemos surgiram na década de 1940/1950, mas a ideia de uma máquina autônoma era bem anterior, sendo que o uso da palavra “robô” remonta à década de 1920, na antiga Tchecoslováquia. A origem da palavra robô (robot) vem da peça de teatro do autor tcheco Karel Tchápek denominada R.U.R, abreviação de Rossumovi univerzální roboti (Robôs Universais de Rossum). A peça, de 1920, conta a história de uma fábrica que faz trabalhadores artificiais denominados roboti (uma junção das palavras tchecas robota – que significa “trabalho obrigatório” – e robotnik – que significa “servo”): eles se revoltam contra seus criadores e terminam destruindo a humanidade. Os robôs na peça não são simples amontoados de metal – são feitos de matéria orgânica e de aço.
Para quem tiver interesse na peça de teatro, achei no YouTube uma versão italiana com legendas em inglês muito legal:
O que é, afinal, um robô?
Vou utilizar aqui a definição da roboticista sérvia Maja Matarić em seu livro Introdução à robótica (São Paulo: Editora Unesp/Blucher, 2014): “Um robô é um sistema autônomo que existe no mundo físico, pode sentir o seu ambiente e pode agir sobre ele para alcançar alguns objetivos” (p. 19). A autora, didaticamente, desmembra essa definição para pormenorizar as conceituações (pp. 19-21).
Embora tenha publicado seu livro em 2007, os pontos levantados por Matarić sempre fizeram parte daquilo que se entende por “robô” quando o assunto é cibernética. Em 1949/1950, Norbert Wiener desenvolveu o robô Palomilla: um triciclo com duas rodas grandes atrás e uma pequena na frente montadas em uma base retangular de metal. Nos dois cantos frontais, o robô tinha duas fotocélulas representando olhos: o output das fotocélulas era amplificado e alimentado em uma calha que controlava a pequena roda frontal. Desse modo, Palomilla se movia sempre em direção à luz (ou ao contrário, se a voltagem das fotocélulas fosse revertida). Palomilla foi desenvolvida para simular duas doenças neurais: Parkinson e tremores (lembrando que a cibernética sempre esteve intimamente ligada à biologia, também).



<Acréscimo versão 2019>
É importante ressaltar que, ao contrário da Cibernética estadunidense propagada por Wiener, a versão britânica dos estudos cibernéticos não era focada em aparatos militares, nem realizada com auxílio de grandes verbas: essencialmente, a Cibernética britânica era amadora e centrada no entendimento do cérebro humano como máquina (Pickering, 2010).
Um dos ciberneticistas britânicos mais famosos desse período foi o neurofisiologista Grey Walter (1910-1977). Durante sua trajetória como pesquisador, Walter percorreu três campos principais de problemas: 1) estudo individual dos componentes do cérebro (ou seja, um enfoque reducionista); 2) uso de EEG (eletroencefalograma) para entender as ondas de sinais cerebrais derivadas de estímulos; 3) construção de modelos de cérebros. O terceiro campo foi o que levou Walter à robótica.
Walter dizia que suas tartarugas robôs pertenciam a uma nova espécie inorgânica, a Machina speculatrix (máquina especuladora, em português). As duas primeiras tartarugas, nomeadas Elsie e Elmer, foram construídas em sua casa nos tempos livres entre a Páscoa de 1948 e o Natal de 1949. As tartarugas possuíam duas rodas traseiras e uma dianteira, que era alimentava por uma bateria a fim de movimentar o conjunto para frente, enquanto outro motor era o responsável por fazer o conjunto da “cabeça” rotacionar em seu eixo: ao ir de encontro a um obstáculo, um interruptor de contato no corpo fazia com que a máquina recuasse e, assim, voltasse a ficar livre. A “cabeça” da tartaruga possuía uma célula fotoelétrica que, ao captar uma fonte de iluminação, cortava a energia do motor de sua rotação, fazendo com que o conjunto caminhasse para a frente, em direção à luz. Quando a fonte de luz cessava, a tartaruga voltava ao seu modo de “busca” normalmente. Quando a bateria começava a ficar fraca (por falta de luz na fotocélula), a tartaruga buscava uma fonte de iluminação para se recarregar sozinha.
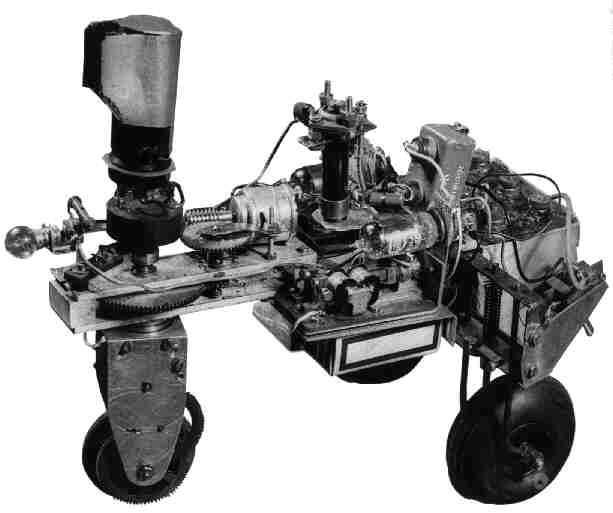
Tartaruga sem a carapaça. In: Jakob Fredslund, Simplicity applied in projects involving embodied, autonomous robots, 2002, p.8.
Qual a relação da tartaruga, então, com o objeto de pesquisa dos primeiros ciberneticistas britânicos: o cérebro? Para Grey Walter, a tartaruga era um organismo vivo, com órgãos motores, sensores e, também, cérebro, que, nesse caso, era constituído por um simples circuíto formado por uma válvula eletrônica, um capacitor e um conjunto de relês (que eram acionados ou desligados de acordo com os diferentes comportamentos da tartaruga). Assim, a tartaruga, quando relacionada com a ciência do cérebro, podia ser entendida como uma forma de comportamento adaptável: ao explorar o seu entorno, reage a ele, assim como todos os organismos o fazem – isso sugeria, então, que o cérebro orgânico podia conter estruturas semelhantes à tartaruga. Walter denominou a rotação da fotocélula em 360º buscando luz como escaneamento, e afirmou que o cérebro também possuía essa capacidade, pois constantemente escaneava, utilizando os sensores de entrada do corpo humano, objetos de interesse, padrões no mundo e também configurações inerentes ao ser.
</Acréscimo versão 2019>
Um pouco antes de Wiener, o neurofisiologista britânico William Grey Walter (1910-1977) construiu uma série de máquinas inteligentes conhecidas por “tartarugas”. Duas das mais famosas tartarugas receberam os nomes de Elmer e Elsie, baseados nos acrônimos de ELectro MEchanical Robots (robôs eletromecânicos) e Light Sensitive (sensíveis à luz). Essas tartarugas eram robôs simples, construídos com três rodas em forma de triciclo, usando a roda dianteira para direção e as duas rodas traseiras para condução; também contavam com uma célula fotoelétrica (ie. sensor) para detectar níveis de luminosidade, um sensor de colisão (acionado quando a “carapaça” esbarrava em outros objetos espalhados pelo ambiente), uma bateria recarregável (que lhe garantia autonomia), três motores para movimentação das rodas, e um circuito eletrônico analógico com dois tubos de vácuo (Matarić 2014: pp. 28-29). Com todos esses elementos, os seguintes comportamentos eram esperados das tartarugas: procurar a luz e ir em direção a ela (ou evitá-la), desviar de obstáculos no ambiente, e recarregar a bateria. Podemos ver a simpática invenção de Grey Walter nos vídeos abaixo:
A automação nunca deixou de ser uma questão delicada entre os ciberneticistas e a população em geral. Para Wiener, a automação era o equivalente do trabalho escravo e devia aceitar a condição econômica do trabalho escravo. Também dizia que a automação iria produzir uma situação de desemprego comparável à da Depressão (e, em 1962, o presidente John F. Kennedy foi perguntado por um jornalista sobre o impacto dos computadores e da automação nos empregos; o presidente respondeu que o maior desafio nos anos 60 seria achar emprego para os trabalhadores substituídos pela automação: a resposta era mais baseada em medo do que em fatos…). Norbert Wiener também refletiu sobre os impactos da automação/cibernética na religião e elencou três pontos de conflito entre homens, máquinas e Deus em seu livro God and Golem, Inc.:
1) As máquinas podiam aprender – as máquinas mostravam que a Bíblia podia estar errada, pois as criações conseguiam suplantar os criadores (por exemplo, no jogo de damas ou xadrez): poderes mecânicos, segundo Wiener, mostravam os limites do poder divino;
2) As máquinas podiam se auto reproduzir – havia o tabu de que apenas Deus pode criar vida. As máquinas mostraram que elas eram capazes, de fato, de fazer outras máquinas a sua semelhança;
3) As máquinas podiam trazer à tona magia e lenda – Wiener não via a máquina como mágica: ele via a mágica como mecânica. Para ilustrar a mecânica da mágica, Wiener usou o poema de Goethe de 1797 O Aprendiz de Feiticeiro. Para Wiener, a história seguia um padrão que era refletido em inúmeras fábulas, contos de terror e textos religiosos: o homem ambicioso invoca a ajuda da mágica apenas para descobrir que perdeu o controle sobre sua criação.
Para encerrar o tópico sobre automação/robôs na cibernética, uma curiosidade. Durante os anos 1960, dois termos se tornaram famosos: 1) cybernation – referindo-se à automação computadorizada na indústria; 2) cyberculture – criado pela matemática Alice Mary Hilton em 1963, para dizer que a automação não era simplesmente uma segunda revolução industrial: para ela, a automação traria à humanidade a liberdade de tarefas para poder se tornar livre para pensar (se o cultivo, ou seja, a agricultura, trouxe energia para criar a civilização, a automação, ou seja, a cibercultura, teria efeito parecido, com a vantagem de libertar os humanos da necessidade de cultivar os próprios alimentos).
Leitura recomendada
› WIENER, Norbert. God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion. Cambridge, Massachusetts: The MIT Press, 1964.
Já foi recomendado na aula anterior, mas vale a releitura pelos aspectos do confronte homem/máquina vs Deus.
 Loading...
Loading...
› ČAPEK, Karel . RUR. 1920.
Se quiser ler a obra que deu origem à palavra “robô’, fique à vontade.
Loading...
› WALTER, W. Grey. “An imitation of life”. In: Scientific American, 182(5), 1950, pp. 42-45.
Artigo de Grey Walter sobre suas simpáticas “tartarugas”.
Loading...
› PICKERING, Andrew. The cybernetic brain: sketches of another future. Chicago: University of Chicago Press, 2011.
Capítulo que detalha o trabalho de Grey Walter.
Loading...
Jogo recomendado
Já sonhou em controlar o seu próprio robô em uma simulação? Com Xemo: Robot Simulation (2016) você pode!
Clique aqui para acessar a página de download gratuito: Acessar.
Filme recomendado
Vejam a série da Netflix Love Death + Robots. É muito, muito boa!
Powerpoint da aula
Aposto que a aula foi tão boa que até se esqueceu de fazer anotações, não é mesmo? Sem problemas!
Clique aqui para baixar o PPT: Download da aula.

Este trabalho está licenciado com uma Licença Creative Commons – Atribuição-NãoComercial 4.0 Internacional.