 ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)
ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)Nessa aula falaremos, finalmente, sobre Cibernética!
Sei que você não se aguentava mais de ansiedade e que passou noites em claro esperando por esse momento. Pois bem, aqui estamos: vamos caçar patos!
Se tiver a minha idade, provavelmente, jogou Duck Hunt para o Nintendinho (ou, como foi comum aqui no Brasil, em algum videogame “genérico”, similar a ele). Caçar os patos no jogo é um problema de antecipação de posição do alvo: temos de ler a trajetória da ave na tela e “adivinharmos” em que local ela estará no futuro – desse modo, miramos a arma de brinquedo não onde o pato está, mas, sim, onde ele supostamente estará. Tratando-se de caça real, o caçador experiente observa o pato voando, seus olhos enviam informações visuais por meio de nervos ao cérebro, o cérebro computa a posição apropriada para o rifle, e seus braços ajustam a posição do rifle, “predizendo” a trilha de voo do pato. Isso, como vimos na aula anterior, também foi a base para o desenvolvimento de sistemas de defesa antiaéreos durante a Segunda Guerra Mundial: a balística e a predição estiveram no cerne da produção de equipamentos pela Sperry Corporation.
Devemos, agora, ver o outro lado da guerra: aquele que foi se desenvolvendo em universidades durante esse período. Uma figura acadêmica foi central nesse contexto. Inclusive, é tida como o “pai da Cibernética”: estamos falando do matemático estadunidense Norbert Wiener, que publicou três livros sobre o tema: Cybernetics: or control and communication in the animal and the machine (1948), The human use of human beings (1950), e God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion (1964).
Em fevereiro de 1940 (cinco meses após os nazistas invadirem a Polônia), Norbert Wiener passou a integrar um subcomitê no NDRC. No dia 22 de novembro do mesmo ano, submeteu ao comitê chefiado por Vannevar Bush um memorando de quatro páginas sobre a predição antiaérea: antes do Natal, seu projeto foi aprovado com financiamento. Wiener contratou, então, como engenheiro chefe de projeto, o graduado no MIT de 27 anos Julian Bigelow, que construiu um aparato no laboratório que simulava as curvas randômicas dos pilotos alemães sobre Londres durante os bombardeios. Após dois anos de pesquisa sem resultados práticos, em 1942, a diretoria do NDRC começou a ficar cética com relação ao trabalho de Wiener e, no mesmo ano, o contrato de Wiener de $2.325 dólares foi terminado sem resultados. Fato que Norbert Wiener jamais aceitou e fez questão de mencionar em seus livros publicados.
Porém, Wiener continuou seus estudos, certo de que a pesquisa sobre o controle da informação entre homens e máquinas traria benefícios ao conhecimento. No inverno de 1947, organizou um seminário interdisciplinar sobre comunicação em forma de jantares com vários cientistas (o sonho de todos nós, convenhamos). Três ideias permeavam o enfoque proposto por Wiener sobre automação e interação homem-máquina, a qual denominou Cibernética (a palavra deriva do termo grego kubernetes, ou seja, piloto, timoneiro dos navios; aquele que regula a todo instante o percurso no mar – porém, Wiener afirma em um de seus livros que só depois veio a saber que “cibernética” já havia sido usada por Ampère com referência à ciência política, no século XIX)
1) controle – o propósito principal dos seres vivos e das máquinas é controlar seus ambientes (ao invés de só observá-los), ou seja, a entropia tem papel fundamental (ela é a medida da desordem, da incerteza, degradação, e perda de informação: reverter isso requer controle por parte de um sistema sobre o ambiente);
2) feedback – a habilidade de qualquer mecanismo usar sensores para receber informação sobre sua performance atual (input) ao invés da performance esperada (quando um feedback tende a se opor a o que um sistema está já fazendo – por exemplo, fazendo um motor parar de girar a torreta ou dizendo a um termostato para desligar um aquecedor, ele é denominado ‘feedback negativo’, e geralmente serve para estabilizar um estado desejado. Para Wiener, o feedback é a propriedade de ser capaz de ajustar conduta futura por meio da performance passada);
3) relação entre homens e máquinas – o feedback promovia um sentido cinestésico para as máquinas, semelhante à consciência humana de posição ou movimento de braços e pernas (Wiener tendia a antropomorfizar as máquinas e, também, a mecanizar o homem ao usar comparações com as máquinas para entender a fisiologia humana).
Vamos aprofundar um pouco cada ponto cibernético.
É impossível falar sobre cibernética sem mencionar a entropia, uma vez que ela é o cerne da própria cibernética. Tudo tende a se perder, a se desorganizar: é o exemplo clássico da nossa querida termodinâmica, onde um corpo mais quente perderá calor para um mais frio. A entropia, assim, é a medida da desordem: quanto mais desorganizado algo estiver, maior será a sua entropia. Pense naquele seu artigo que você tem um prazo apertado e um monte de assuntos para escrever nele: no começo, tudo está uma bagunça – você tem um monte de textos xerocados espalhados pelo quarto, anotações com sua própria letra que não consegue entender, copos de café sujos largados ao lado do teclado, lenços com lágrimas de frustração ao chão… se não fizer nada a respeito, tudo tende a piorar e a bagunça, a aumentar. Mas chega uma hora em que toma vergonha na cara (geralmente devido a uma força maior denominada “desespero”), e começa a organizar tudo, incluindo seus pensamentos, para dar forma ao produto final: um artigo. Assim sendo, você conteve a entropia (por um tempo, ao menos) e gerou informações a partir da organização dela (afinal, as ideias jogadas no artigo não passam disso: informações). Parabéns, seu artigo está pronto para ser esculachado pelos pareceristas!
Artigos à parte, o controle da entropia, como dito, é a base da cibernética. Todos os sistemas cibernéticos vão trabalhar de modo a conter a desordem e, assim, dar um sentido/ação às coisas. Acredito que os seguintes vídeos possam ajudar a esclarecer essas ideias:
<Acréscimo versão 2019>
Existe um mito sobre a criação do conceito de feedback. Ele é atribuído a uma epifania do engenheiro da Bell Labs Harold Black que, na travessia de balsa pelo rio Hudson entre Nova Jersey e Manhatan em 1927, encarou a Estátua da Liberdade e percebeu que, se alimentasse a saída (output) de um amplificador de volta à entrada (input), mas em fase reversa, e mantivesse o dispositivo sem oscilar, conseguiria cancelar a distorção na saída. Sete anos depois, Black publicou seu trabalho sobre amplificadores, modificando o entendimento que tínhamos sobre controle de informações até então. Vamos chegar a isso em breve.
As linhas telefônicas estadunidenses do início do século XX possuíam algumas limitações técnicas. Talvez a mais impactante fosse a qualidade do sinal devido à distância entre os pontos de emissão e recepção. Os microfones de carbono permitiam que os fracos sinais acústicos viajassem ao lango dos cabos sem quaisquer tipos de ganho de sinais de ondas sonoras ao longo deles. A resistência inerente dos cabos aos sinais, causando perda de qualidade, ficou conhecida como atenuação. Uma das maneiras de resolver esse problema seria aumentar a espessura dos cabos de cobre, contudo, isso demandaria altos custos devido à reestruturação de toda a rede telefônica, principalmente no preço das ligações entre longas distâncias. Ou seja, se atualmente reclamamos quando nossos sinais de celular ou telefone ficam “pulando” ao utilizá-los, imagine como era ter de se esgoelar ao telefone e torcer para ouvir e ser ouvido no início da telefonia!
Surgia assim a necessidade de se repetir o sinal de voz ao longo das distâncias dos cabos. Esse problema foi atacado pelos engenheiros da AT&T (American Telephone and Telegraph Company), empresa fundada por Alexander Graham Bell em 1885 (que atualmente empresta seu nome ao estádio de futebol americano do meu Dallas Cowboys), na década de 1910. O desenvolvimento de repetidores, para além da famosa conversa transcontinental entre Graham Bell e Thomas Edison em 1915, fez com que houvesse uma profunda mudança conceitual: a rede agora se tornava uma máquina. As linhas telefônicas deixaram de ser meros receptáculos de energia elétrica e passaram a carregar informações. Um repetidor era um amplificador que adicionava energia e renovava o sinal em qualquer ponto da rede cabeada fazendo com que, doravante, as vozes se tornassem sinais que pudessem ser especificados e padronizados. Aqui vai uma curiosidade: a necessidade por criar medidas padronizadas fez com que a atenuação, antes denominada bell pelos engenheiros da empresa de Graham Bell, ganhasse o novo nome de decibel, ou seja, a medida bell fatorada por dez. Esses repetidores “revolucionaram” as telecomunicações (e a Cibernética como um todo) pois permitiram que a mensagem não fosse mais, ela mesma, o seu meio: se antes os sinais sonoros eram apenas atrelados à eletricidade que percorria os cabos, agora esses sinais podiam ser entendidos e manipulados em seus próprios termos, dissociados do meio físico ao qual estavam corporificados.
Agora, rapidamente, vamos tentar entender a imagem abaixo.
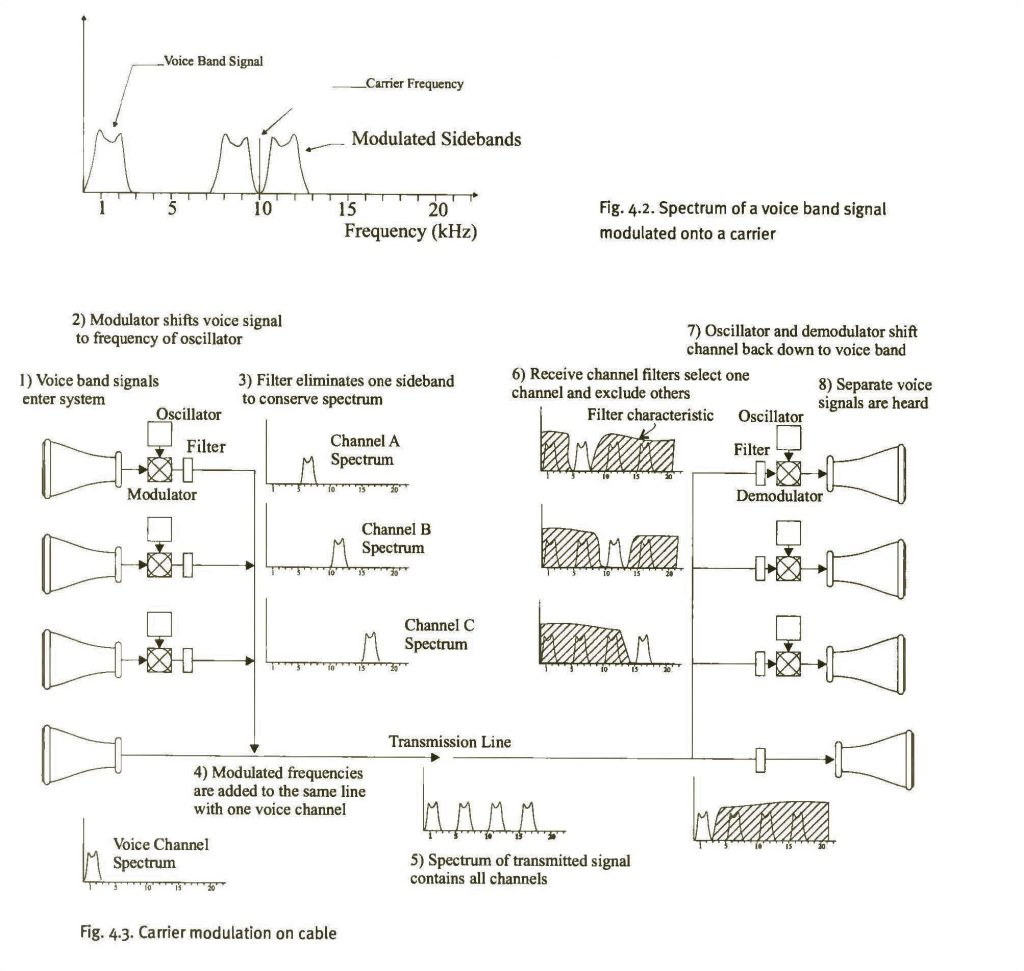
In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 115.
O princípio de funcionamento das telefonia era o seguinte: 1) A pessoa X falava no transmissor de seu telefone, composto por uma peça acústica na qual ficava um microfone de carbono dentro; 2) A fala (tal como no telégrafo) passavam por um oscilador que gerava as ondas sonoras; 3) Essas ondas passavam por um filtro que permitia apenas que uma parte determinada da onda permanecesse (modulação); 4) Essas frequências ondulares de diferentes telefones percorriam o mesmo cabo telefônico; 5) Ao chegar ao receptor, os filtros faziam com que apenas a onda sonora desejava fosse retida, eliminando as demais; 8) O receptor (pessoa Y) ouvia o sinal sonoro.
Esse processo de viagem sonora através dos cabos, contudo, como dito, sofria quando a distância era longa: o sinal ia sendo atenuado devido à resistência física do cobre dos cabos. Os repetidores implantados ao longo dos cabos simplesmente, digamos, repetiam o processo descrito… Os repetidores amplificavam o ganho (gain) dos sinais e, com isso, acabavam causando interferências nas ondas, gerando as famosas “conversas cruzadas” (se, assim como eu, você for jovem há mais tempo, certamente experimentou conversas cruzadas ao falar nos quase extintos telefones públicos).
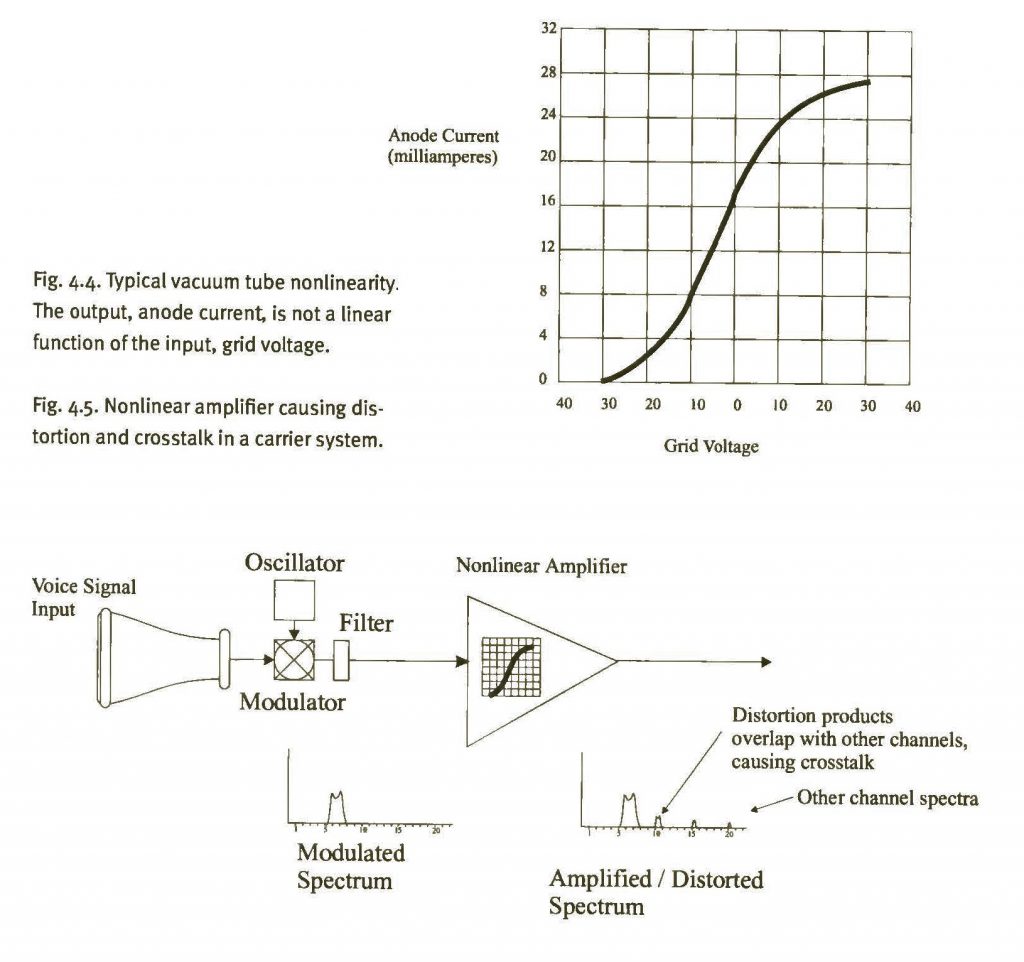
Amplificador não linear. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 117.
Esse problema de amplificação de sinal com ganho na onda foi o que causou a epifania de Harold Black em 1927. Em seu artigo de 1934, após sete anos atacando o problema nos laboratórios Bell, Black pormenorizou a solução encontrada: estabelecendo-se um circuito na saída do amplificador (após o ganho de sinal) que realimentasse a entrada, faria com que a distorção nas ondas sonoras diminuísse – segundo Black, o seu circuito de feedback fez com que a distorção fosse reduzida por um fator de 100.000 (fazendo com que o ganho também fosse reduzido nessa proporção). A demora na publicação dos resultados foi devida à resistência interna de seus pares dentro do ambiente de trabalho. Foi muito difícil convencer seus colegas (e seu chefe de laboratório) de que o feedback, ao contrário do que se utilizava até então, era negativo, não positivo: ou seja, ao invés de o feedback acrescentar ganhos ao sistema, ele os subtraía (os sinais eram revertidos). Até então, acreditava-se que os feedbacks eram todos positivos, causando regenerações ao sistema (o amplificador recebia as ondas de sinais de volta muitas vezes). Harold Black, assim, foi o responsável por mostrar que o seu feedback negativo era o oposto da regeneração: o ganho era reduzido, não aumentado. Essa retroalimentação levava o sistema à estabilidade, sem distorções. A concepção de Black é utilizada até hoje.
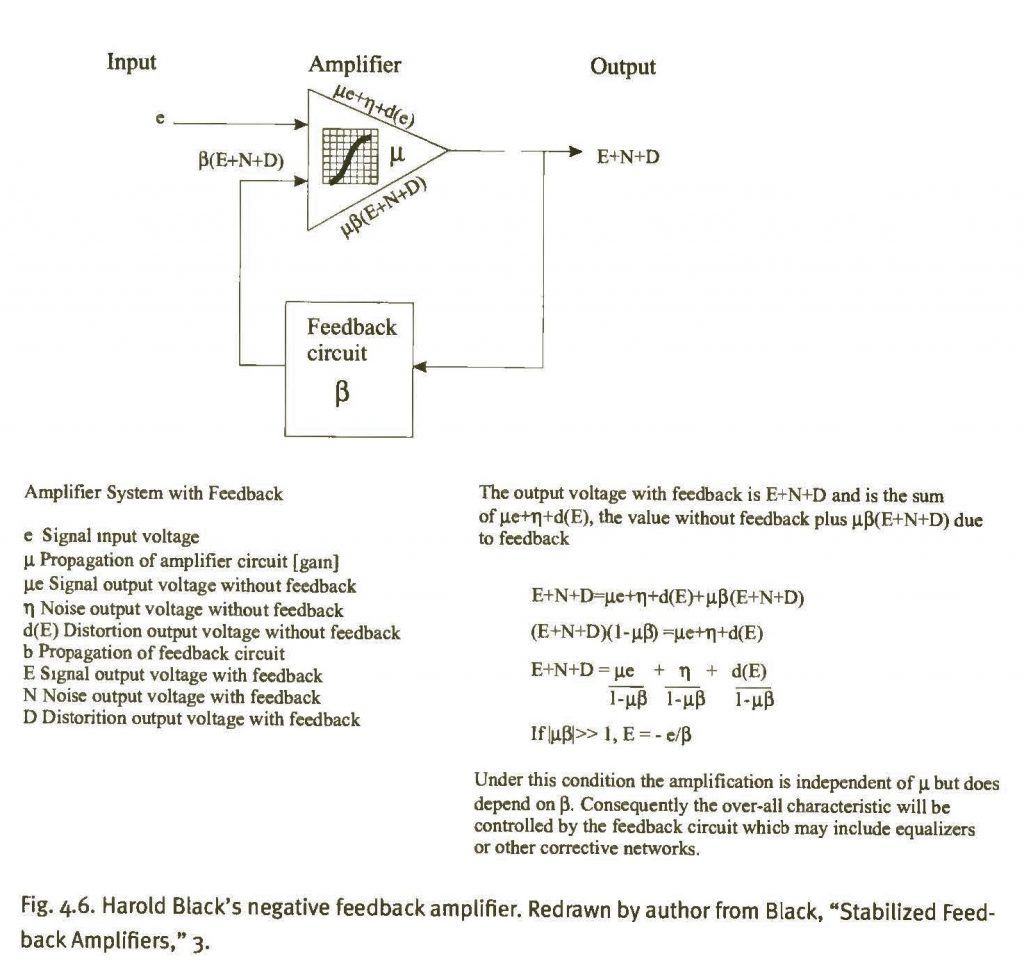
Feedback negativo de Black. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 117.
Sugiro, de verdade, que veja esse vídeo:
</Acréscimo versão 2019>
O feedback está relacionado com a entropia pois, ele mesmo, é o controle da entropia! Felizmente, é um conceito mais fácil de se entender. O seu corpo, com todo o respeito, é uma máquina! Mas de feedback. Se a sua saúde estiver em dia, nenhum sintoma aparecerá em seu corpo, correto? Seus órgãos estão trabalhando direitinho e todo o álcool consumido no fim de semana está sendo eliminado normalmente: em outras palavras, todos os órgãos estão dizendo “OK! Estamos OK!” e, assim, a resposta deles, ou seja, o feedback, diz que tudo está em ordem. Contudo, se você tiver, por exemplo, uma infecção no corpo, seu corpo irá lhe avisar de que algo está muito errado aumentando a temperatura, causando a febre. Para controlar sua temperatura, terá de ingerir medicamentos (ou homeopatia, se quiser continuar doente, claro) que farão os sintomas desaparecerem ao controlarem aquilo que está errado dentro de si: quando a febre sumir, você terá o feedback de que tudo está normal novamente (e não será dessa vez que morrerá e ficará livre dos boletos). Resumindo: o seu corpo tem uma norma de conduta que, ao ser modificada (ie. infecção), gera um feedback (febre) avisando que algo deve ser feito a respeito.
Vamos pensar, agora, em questões computacionais divertidas, ou seja, videogames. Você acabou de comprar aquele jogo que tanto queria e colocou a mídia no aparelho e ligou tudo. O jogo começa, você pega o controle e… nada acontece! Isso não é o normal, não é mesmo? O correto seria você interagir, atuando dentro do jogo, movimentando o seu personagem/avatar. O jogo continua parado, e percebe, então, que está sem pilhas novas no controle. Ao substituí-las, o sistema volta a atuar como pretendido: seus movimentos nas alavancas e botões geram movimentos do personagem na tela do jogo. Você está fornecendo inputs (entradas) a partir dos botões do controle que, ao chegarem no videogame, são processados pelo computador e, depois, têm os outputs (respostas/saídas) transmitidos para a tela da TV/monitor onde você vê seu personagem respondendo a cada comando feito no controle em tempo real. Embora tudo seja quase instantâneo, não deixa de ser um loop (laço) de feedback, como pode ser visto abaixo:
Esse ponto não tem todas as conceituações dos pontos anteriores, mas não deixa de ser tão fascinante quanto. Um exemplo desse ponto é dado por Wiener quando fala sobre próteses artificiais em seu livro de 1964, denominado God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion: segundo ele, uma perna de madeira é um substituto mecânico para uma parte de carne e sangue, assim, um homem com uma perna de madeira é um sistema composto de partes humanas e mecânicas. O funcionamento cibernético de uma prótese pode ser explicado da seguinte maneira: suponha que um homem teve a mão cortada próxima ao pulso, mas o coto ainda possui músculos que possam ser contraídos – embora esses músculos não possam mais movimentar sua mão e dedos, eles são capazes de produzir sinais elétricos; eletrodos podem captar esses sinais, amplifica-los, e manda-los para motores elétricos em uma mão artificial; contudo, falta ainda, nesse caso, o laço de feedback: a mão artificial não consegue sentir, não consegue tocar, porém, sinais podem ser enviados do membro artificial ao cérebro do amputado por meio de sensores de pressão colocados nos dedos, por exemplo; com o tempo, o amputado aprenderia a substituir a sensação táctil natural de outrora pela fornecida através dos sensores.
Esse vídeo é bem interessante:
Outro tema fundamental na Cibernética é o da homeostase, ou seja, a capacidade de adaptação de um sistema para que ele se mantenha sempre em equilíbrio. Um pesquisador britânico foi o responsável por demonstrar, na prática, essa conceituação. Em 1948, a primeira “maquina pensante” foi inventada na Inglaterra, no hospital de saúde mental em Barnwood, uma vila perto de Gloucester. O médico Ross Ashby inventou o homeostato, uma máquina inspirada por seu trabalho junto aos pacientes com distúrbios mentais.
Ashby levou 15 anos para fazer o design de seu cérebro eletrônico e mais 2 anos para construí-lo: ao todo, custou £50. Sobre a estrutura e funcionamento do homeostato: tinha quatro interruptores de controle de bombas RAF na base, com quatro caixas de alumínio. As únicas partes móveis eram quatro pequenos imãs, balançando como agulhas em compassos no topo de cada caixa de alumínio. Cada uma das quatro caixas tinha quinze interruptores brutos para mudar vários parâmetros. Embora, à primeira vista, as caixas parecessem desconectadas umas das outras, elas interagiam entre si. Quando a máquina era ligada, os imãs em uma unidade podiam ser movidos pelas correntes elétricas das outras unidades. As movimentações dos imãs, por sua vez, alteravam as correntes, que mudavam as movimentações novamente, e assim por diante. A máquina foi elaborada de modo a manter os quatro imãs eletromagnéticos em uma posição estável, com a agulha sobre cada caixa centralizada no marcador: essa posição era a “normal/confortável” do homeostato. O experimento, contudo, servia para criar “desconforto” na máquina e ver como ela se comportava. Isso podia ser alcançado revertendo a polaridade de uma conexão, mudando algum feedback da máquina, revertendo um imã, restringindo o movimento de um imã em um lado, juntando imãs… A ideia era causar distúrbio no equilíbrio da máquina e ver como ela reagia. Não importava o que Ashby fizesse, logo a máquina encontrava um meio de se adaptar às novas condições, recentrando as agulhas. Ashby acreditava que o homestato resistia a qualquer tentativa de distúrbio.
<Acréscimo versão 2019>
Tomando por base o livro The Cybernetic Brain. Sketches of another future (2010), de Andrew Pickering, vamos tentar entender melhor o diagrama de funcionamento de uma unidade do homeostato ilustrado abaixo presente na obra Design for a Brain, de Ashby, publicada em 1952.

Cada unidade tinha entradas (inputs) independentes umas das outras que eram alimentadas em um conjunto de bobinas (A, B, C, D), gerando, assim, um campo magnético que fazia um imã em forma de barra (M) se movimentar em seu eixo vertical. Ao imã estava anexado uma palheta de metal protegida por um invólucro de acrílico (o topo em cada homeostato; o desenho em forma de arco na parte de cima do diagrama) que captava a voltagem dependendo de sua posição: essa voltagem controlava o tríodo (válvula eletrônica; o círculo sem nome no diagrama) que, por sua vez, controlava as correntes elétricas da saída (output). Cada unidade podia operar de dois modos, de acordo com os interruptores posicionados na frente do dispositivo (letra S, no diagrama): no primeiro modo de configuração, a corrente de entrada (input) chegava à bobina magnética através de um comutador (X), que invertia a polaridade da entrada, e também através de um potenciômetro (P), que aumentava ou diminuía a corrente elétrica de acordo com sua configuração – as configurações do P e do X eram estabelecidas manualmente, usando os botões das fileiras superiores e intermediárias presentes na frente da unidade; no segundo modo, o interruptor S fazia com que a corrente de entrada (input) passasse por um uniseletor/interruptor de passo (letra U, no diagrama) que contava com 25 posições e, ao contrário dos potenciômetros e comutadores, não tinha sua configuração estabelecida manualmente: eram controlados por um comportamento interno do homeostato – quando a corrente elétrica de uma unidade ficava acima do limite pré-estabelecido, o relê (F) fechava, fazendo com que a bobina (G) levasse o uniseletor à próxima posição, de forma randômica.
Ainda seguindo a análise de Pickering, o autor cria uma situação hipotética para ilustrar o funcionamento do homeostato (pp. 104-105). Primeiramente, é necessário frisar que qualquer unidade do homeostato é inerte, não faz nada sozinha. Dito isso, vamos supor que para uma das unidades (podemos chamá-la de homeostato 1) coloquemos o interruptor (S) para se conectar ao uniseletor (U) enquanto os demais homeostatos permanecem com o interruptor configurados manualmente por meio dos comutadores e potenciômetros: em outras palavras, o homeostato 1 tem propriedades variantes enquanto os demais têm propriedades fixas. Quando essa combinação é acionada, o homeostato 1 pode se encontrar em uma das duas condições: 1) condição de equilíbrio estável – significando que a palheta de metal no invólucro de acrílico permanecerá na posição central, demonstrando que não há saída de corrente elétrica; 2) condição instável – significando que a palheta de metal pode atingir os níveis máximos de medição: nesse caso, quando a corrente elétrica cruzasse o limite estabelecido, o relê fecharia, fazendo com que o uniseletor mudasse de posição, obrigando o homeostato 1 a, novamente, buscar uma das duas condições até que, em determinado momento, permanecesse na condição estável e, assim, a palheta de metal repousasse na posição central.
Desse modo, iniciado em qualquer configuração, o homeostato podia reorganizar-se randomicamente até encontrar uma condição de equilíbrio dinâmico com o seu ambiente, sem qualquer intervenção externa.
<Acréscimo versão 2019>
Em 1952, Ashby foi convidado a apresentar o homeostato na Macy Conference em Nova Iorque: na ocasião, estavam presentes Gregory Bateson, Margaret Mead, Warren McCulloch, Julian Bigelow e Arturo Rosenblueth (Norbert Wiener não estava na conferência). Indo na contramão da maioria dos ciberneticistas presentes, Ashby acreditava que não havia distinção entre sistema e ambiente: o homeostato era o organismo e o ambiente ao mesmo tempo, os imãs elétricos eram um distúrbio e um meio de superar o ambiente (isso deixou Bigelow bastante nervoso e gerou discussões). Para Ashby, sua máquina aprendia pois se adaptava a cada situação que se apresentava, tal como se treinam os cães (o comportamento muda de acordo com o aprendizado). Com seu aparelho, Ross Ashby reforçou as ideias em voga de que: 1) os humanos são mecanismos que respondem a seus ambientes tentando manter a homeostase; 2) a restrição para se criar máquinas inteligentes reside em formular os problemas de modo correto; e 3) um conceito de informação que privilegia a exatidão sobre o significado serve melhor a um modelo de construção do que um conceito de informação impreciso. Para Ashby, a cibernética não era sobre matemática, era sobre comportamento, sendo essencialmente funcional e behaviorista.
Se você tiver tido uma formação prévia em Arqueologia, tenho certeza de que chegou até esse ponto pensando: ” Mmmm… Parece que já vi algumas coisas assim…”. Com toda razão! A Cibernética não ficou restrita ao mundo das Exatas (e Biológicas): ela também influenciou demais as Humanidades, principalmente as Ciências Sociais, nas décadas de 1950 e 1960. A Teoria Geral de Sistemas (T.G.S.) elaborada pelo biólogo austríaco Ludwig von Bertalanffy em meados do século XX teve impacto na cibernética e, consequentemente, nas áreas impactadas pela cibernética (dentre elas, a Arqueologia). Resumidamente, para Bertalanffy, um sistema é um conjunto de partes interagentes e interdependentes que, juntas, formam um todo unitário com determinado objetivo e efetuam determinada função em um ambiente. Ou seja: um sistema é formado por elementos independentes que interagem entre si a fim de manter o equilíbrio geral, ou seja, a homeostase. Isso é bastante semelhante ao que foi proposto pela corrente arqueológica do Processualismo, correto?
O artigo de Lewis Binford “Archaeology as Anthropology” (1962) é tido como a pedra angular do Processualismo. Em seu texto, Binford identifica três campos de comportamento que podem ser inferidos a partir dos artefatos e dos contextos em que foram encontrados: ambiental, social e ideológico. Pode-se dizer que o Processualismo (também chamado de Nova Arqueologia) enfatiza a importância de se dar explicação a partir do confronto de hipóteses. Ao contrário do Histórico-Culturalismo, ou arqueologia tradicional, em que semelhanças e diferenças eram explicadas por pessoas compartilhando normas sobre a cultura, a arqueologia processual explica a variação em termos de participação diferencial na cultura (entendida como nosso principal meio de adaptação). O objetivo da arqueologia processual é buscar as razões de por quê ocorrer a variação adaptativa. Para tanto, o processualismo procura leis gerais no comportamento e nos fenômenos da vida social (proximidade com a Antropologia); os padrões comuns podem ser inferidos a partir dos artefatos, que, por sua vez, são classificados de acordo com suas funções, podendo ser tecnômicos (tecnologia, ambiente); sociotécnicos (organização social); ou ideotécnicos (idéias, valores, crenças). Outra característica importante dessa corrente é a teoria de médio alcance, baseada no experimento e na observação de pessoas e animais fazendo coisas no mundo moderno que podem nos auxiliar a entender como padrões são criados. Também faz parte dessa teoria a utilização da Arqueologia Experimental (fabricação de artefatos no presente) para a compreensão da tecnologia do passado. O objetivo da teoria de Binford é compreender transformações evolutivas. O foco central do processualismo não é chegar aos indivíduos, mas ao sistema que há entre o indivíduo e o artefato. O indivíduo é impotente para mudar o sistema (natural ou social). A mudança cultural não ocorre por meio da difusão ou da migração (como dita o Histórico-Culturalismo), mas em termos de processo, sendo os dados arqueológicos particularmente úteis ao estudo das mudanças ocorridas na longa duração.

Diagrama de Sistema Sociocultural. In: David L. Clarke, Analytical Archaeology, 1968.
Se tudo ficou (mais ou menos) claro até aqui, você deve ter percebido que essa área de pesquisa sobre comunicação e controle denominada Cibernética lida com conceituações da física e da biologia para formular uma proposta sobre o que é a informação, e como ela se difunde (por sistemas, nesse caso). Norbert Wiener foi o grande expoente da Cibernética nas décadas de 1940 e 1950, e ainda vamos conversar sobre ele neste curso.
Leitura recomendada
Dessa vez não vou recomendar excertos, pois os temas são bem complexos e caberá a você olhar tudo e selecionar aquilo que lhe interessa. Se, dentre todos, eu puder sugerir uma leitura completa, fique com Cibernética e sociedade: o uso humano de seres humanos, do Norbert Wiener (é o livro escrito para aqueles que, como eu, são das Humanidades).
› WIENER, Norbert. Cybernetics: or control and communication in the animal and the machine. Cambridge, Massachusetts: The MIT Press, 2nd ed., 1985.
 Loading...
Loading...
› WIENER, Norbert. Cibernética e sociedade: o uso humano de seres humanos. Tradução: José Paulo Paes. São Paulo: Cultrix, 1968.
Loading...
› WIENER, Norbert. God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion. Cambridge, Massachusetts: The MIT Press, 1964.
Loading...
› ASHBY, W. Ross. An introduction to Cybernetics. London: Chapman & Hall LTD, 1957.
Loading...
› ASHBY, W. Ross. Design for a Brain. The origin of adaptative behaviour. London: Chapman & Hall LTD, 1960.
Loading...
› BINFORD, Lewis. “Archaeology as Anthropology”. In: American Antiquity, vol. 28, n. 2, 1962, pp. 217-225.
Loading...
› BERTALANFFY, Ludwig von. Teoria geral dos sistemas. Fundamentos, desenvolvimento e aplicações. Tradução: Francisco M. Guimarães. Petrópolis: Editora Vozes, 2010.
Loading...
› SONI, Jimmy & GOODMAN, Rob. A mind at play: how Claude Shannon invented the Information Age. New York: Simon & Schuster, 2017.
(OK, esse é excerto. Faz parte de uma excelente biografia de Claude Shannon. É um capítulo sobre a base da Informação!)
Loading...
› PICKERING, Andrew. The cybernetic brain: sketches of another future. Chicago: University of Chicago Press, 2011.
(Mais um excerto – que poderia ser um livro… O capítulo de Pickering sobre Ashby é muito informativo!)
Loading...
Jogo recomendado
Existem vários exemplos de jogos que lidam com controle de sistemas para adaptação. CivCity: Rome (2006) é um deles e você pode gastar várias horas administrando uma cidade romana.
Clique aqui para baixá-lo: Download do jogo.
Filme recomendado
Essa palestra de um dos maiores ciberneticistas, Stafford Beer, é bem elucidativa. Infelizmente, não possui legendas.
Powerpoint da aula
Aposto que a aula foi tão boa que até se esqueceu de fazer anotações, não é mesmo? Sem problemas!
Clique aqui para baixar o PPT: Download da aula.

Este trabalho está licenciado com uma Licença Creative Commons – Atribuição-NãoComercial 4.0 Internacional.