 ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)
ARISE (MAE-USP / FURG)ARISE (MAE-USP / FURG)O que vem a sua mente quando escuta a palavra Cibernética?
Acredito que deva ter pensado em ao menos uma das duas opções: computadores ou robôs. O imaginário ao redor da cibernética é muito grande e sempre podemos ouvir algo relacionado ao tema em filmes, séries ou livros. “Soldado cibernético”, “crime cibernético”, “mundo cibernético”… algumas dessas palavras são quase “algo dado”, uma vez que as ouvimos ou reproduzimos com certa frequência. Contudo, o que é essa tal de cibernética? Por que ela está presente em nosso vocabulário e é quase um sinônimo de “coisas de computador” ou máquinas inteligentes/robôs? Ao longo deste curso vamos tentar responder essa questão. Digo “tentar” pois, como veremos, as conceituações variaram de década para década, desde os anos 1940 até hoje. E, além de definirmos, vamos, também, relacionar a cibernética com a arqueologia, para mostrar que a Ciberarqueologia não é meramente o “uso de computadores na pesquisa arqueológica” (mesmo que fosse, os computadores, por si próprios, são seres cibernéticos).
A cibernética é algo fascinante. É o modo como nos comunicamos com as máquinas, e elas, conosco. Escrevo esse texto graças à cibernética, e você o lê também graças a ela. Seria ela “onipresente”, “onisciente”, o ser que comanda nossas vidas? Bem, talvez seja uma questão de como encarar as coisas e, não duvido, no futuro teremos devotos de deus-máquinas (poderíamos começar pela Google, não é? Afinal, estamos tão dependentes dela…) tal como vemos em algumas obras literárias ou jogos eletrônicos como Deus Ex: Mankind Divided (recomendo que veja o vídeo abaixo, é muito bom e lida com o lado do “culto” à tecnologia!)
https://youtu.be/TvI-ayZrglY?t=6m23s
A “invenção” da Cibernética é comumente atribuída ao matemático estadunidense Norbert Wiener, que publicou seu livro sobre esse tema na década de 1940. Estranhamente (para o dizer o mínimo), Wiener em nenhum momento de sua obra cita toda a gama de trabalhos realizados anteriormente que, de fato, já lidava com a cibernética. Trabalhos esses, ligados às Forças Armadas dos EUA e da Grã-Bretanha.
<Acréscimo versão 2019>
Atingir navios de batalha inimigos que navegam mudando sempre sua direção e velocidade não é tarefa fácil: existem cálculos complexos por detrás dos disparos contra inimigos e, para piorar, esses cálculos devem ser feitos no calor da batalha. Assim, não é difícil imaginar que a batalha naval durante o início da Primeira Guerra Mundial (1914-1918) foi bastante baseada em tentativas e erros, pois ainda não haviam dispositivos confiáveis que facilitassem a vida dos operadores de artilharia no cálculo de mira. Porém, em julho de 1916, o jovem inventor e empresário Hannibal Ford, fundador da Ford Instrument Company em 1915 após sair da empresa Sperry Gyroscope, mostrou aos tenentes do navio USS Texas a sua nova ideia: um sistema mecanizado de cálculos inserido em um dispositivo físico denominado rangekeeper (“sustentador de alcance”, em tradução livre). O protótipo foi muito bem aceito entre os militares, que escreveram um relatório ao Bureau of Ordnance (BuOrd) da Marinha solicitando um contrato – no mês seguinte, a empresa de Ford cotou um preço de $100.000 à Marinha para entregar nove dispositivos rangekeeper dentro de oito a dez meses. Desse modo, a Ford Instrument Company, uma empresa privada, se tornou uma das primeiras companhias a trabalhar com sistemas de controle de fogo dentro das Forças Armadas estadunidenses, juntamente com as empresas Sperry Gyroscope (mais tarde, Sperry Corporation), General Electric (G.E.) e Arma Engineering Company.
Os sistemas de controle de fogo tinham de resolver a questão de mirar uma arma desmembrando-a em três aspectos: percepção (olhar através do visor), integração (estimar a trajetória do alvo), e articulação (apertar o gatilho). A percepção se refere a como um sistema de controle apre(e)nde o mundo, como o enxerga: exemplos de instrumentos de percepção são os telescópios e os telêmetros (rangefinders), que coletam dados do ambiente e do inimigo e os converte para números. A integração está relacionada à memória, ou seja, armazenamento de dados após prévio processamento e filtragem de sinais. Por fim, a articulação se refere à saída (output) do sistema, efetuando uma ação concreta (como a de pressionar um gatilho para disparar a arma). O rangekeeper desenvolvido por Ford, denominado Mark 1, lidava com a resolução desses problemas em conjunto e foram vendidos à Marinha dos EUA por $8.000 cada (pouco depois, a companhia desenvolveu uma versão mais barata do dispositivo, chamada Mark 2, ou “Baby Ford”). A produção e a venda, contudo, eram secretas, e a Ford Instrument Company era proibida de trabalhar para quaisquer outros potenciais clientes (civis ou militares de outras nações).
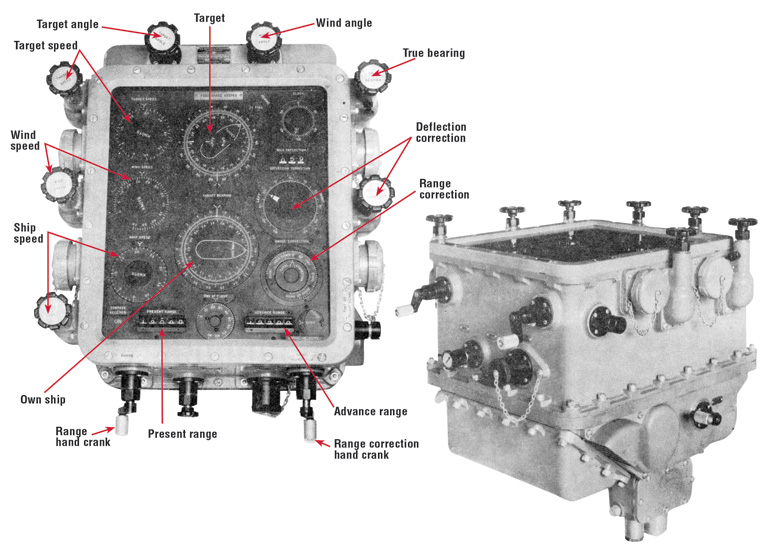
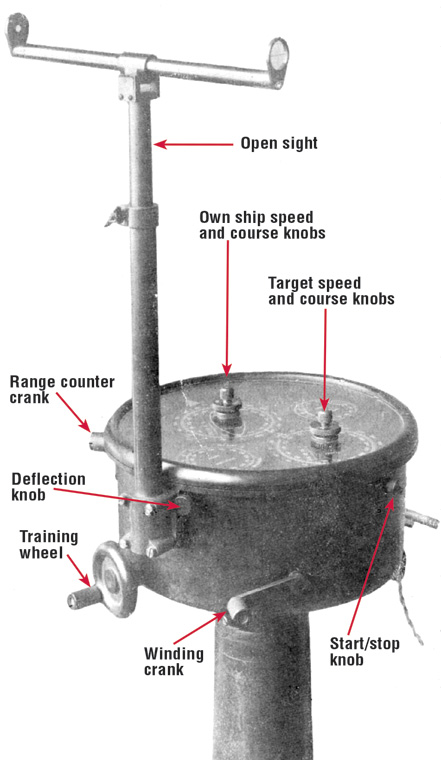
Há poucas fotografias do Mark 1 disponíveis, porém, o Mark 7, da década de 1930, nos dá uma boa ideia de como era a aparência e funcionalidade do primeiro modelo (note que todas as entradas de variáveis eram feitas por manivelas). In: https://www.usni.org/magazines/naval-history-magazine/2015/october/armaments-innovations-revolutionary-rangekeeper
Mark 2: versão mais barata do Mark 1. Também denominado “Baby Ford”. In: https://www.usni.org/magazines/naval-history-magazine/2015/october/armaments-innovations-revolutionary-rangekeeper
Em 1918, outra empresa foi sondada pelo BuOrd, a General Electric (G.E.), conhecida na época como líder em pesquisa industrial e tecnologia eletrônica de ponta. Embora não tivesse experiência anterior em controle de fogo, a G.E. ficou responsável por desenvolver um dispositivo síncrono para ser utilizado em navios de guerra. Entre 1918 e 1920, o engenheiro Edward Hewlett desenvolveu um novo sistema de controle de fogo construído ao redor de um motor auto-síncrono denominado “Selsyn“: esse sistema utilizava corrente alternada (CA, ou AC, em inglês) ao invés de corrente contínua (CC, ou DC, em inglês) para transmitir posição rotacional sobre uma distância através de três fios. Em 1920, o sistema foi implementado nos navios de guerra USS Colorado e USS Maryland. Assim como a solução da Ford, os sistemas síncronos da G.E. tiveram sucesso porque transmitiam dados sem corrupção, permitindo cálculos ainda mais complexos.
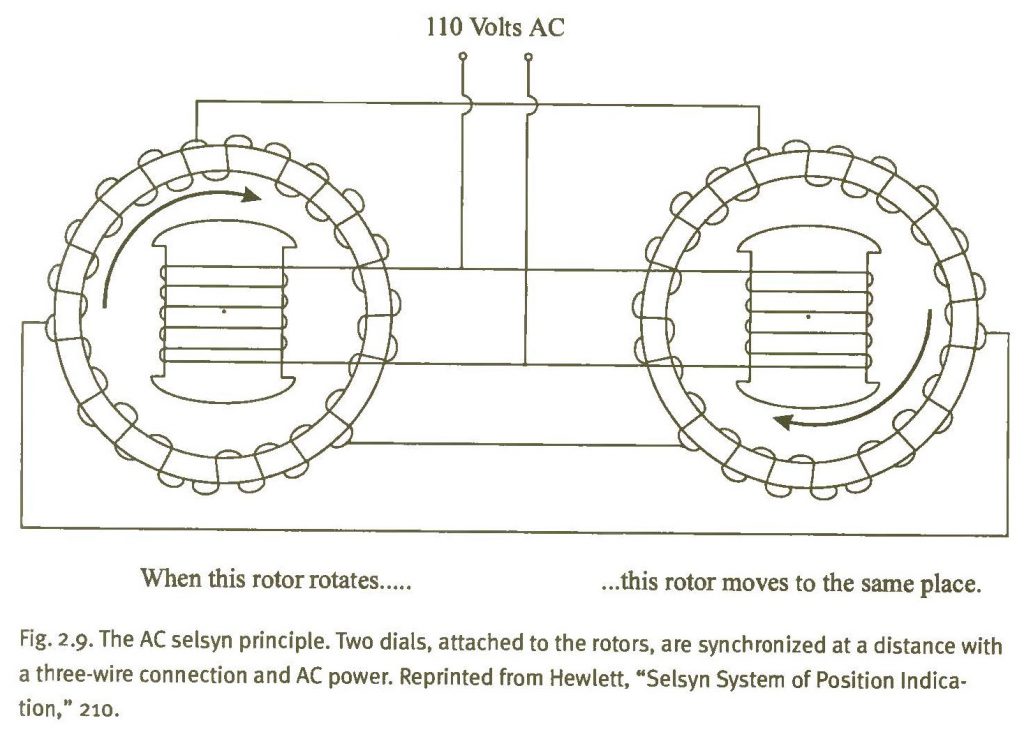
Princípio de funcionamento do motor síncrono da G.E. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 49.
Caso tenha interesse em saber como era a instalação de um controle de fogo em navios, a figura abaixo é bastante didática:
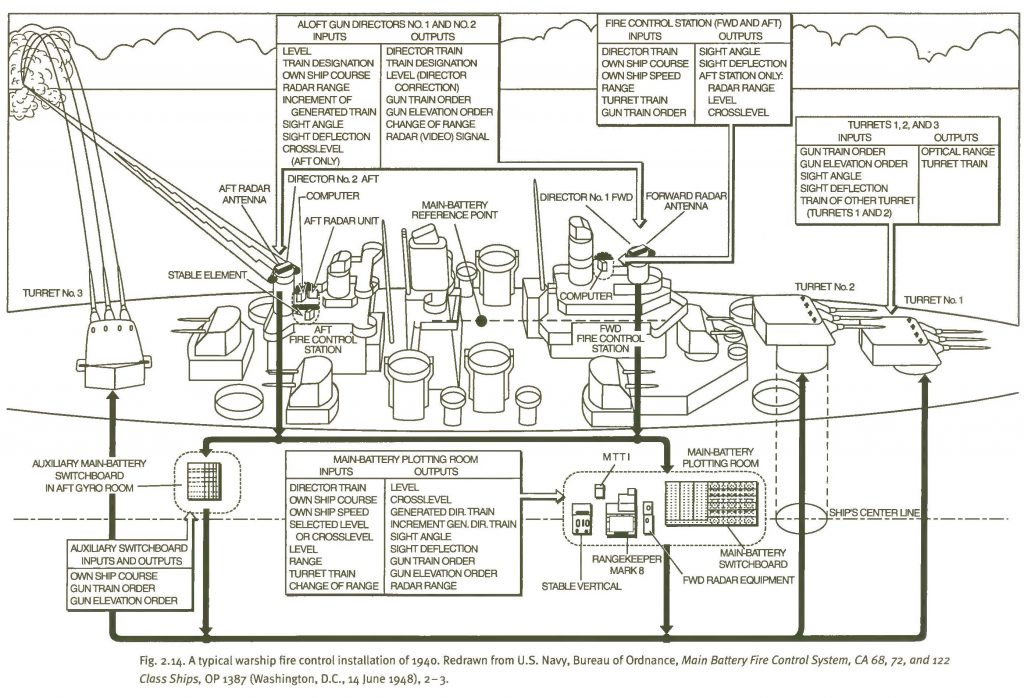
In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 58.
Os dispositivos criados pelas companhias que tinham contratos com as Forças Armadas estadunidenses foram bem sucedidos no campo da batalha naval: agora era possível fazer o rastreamento dos navios inimigos com precisão e acertá-los à distância dentro de um número aceitável de acertos. Os navios, contudo, ainda enfrentavam um grande problema, dessa vez, vindo do céu: os aviões.
</Acréscimo versão 2019>
Falar sobre a cibernética pré-Wiener é falar sobre a empresa Sperry Corporation, fundada em 1910 por Elmer Ambrose Sperry no Brooklyn, em Nova Iorque (EUA). A Sperry Corporation foi uma das principais empresas privadas que auxiliaram as Forças Armadas durante as duas Guerras Mundiais (ao lado da IBM e da RCA). Tendo como foco a produção de equipamentos bélicos, a Sperry atuou em 3 segmentos: 1) produção de pilotos automáticos para navios; 2) produção de pilotos automáticos para aeronaves; 3) sistemas de controles de artilharia antiaérea. A relação entre o governo estadunidense e a Sperry se dava da seguinte maneira: durante os tempos de paz, o governo permitia à Sperry a experimentação de tecnologias de risco e, durante a guerra, exigia (e financiava) produção em larga escala de equipamentos bélicos. O desenvolvimento de pilotos automáticos para aeronaves, por exemplo, auxiliou no controle das máquinas durante os vôos, pois o piloto podia reduzir sua fadiga em momentos de trabalho extremo ou estresse: o dispositivo atuava controlando a direção e altitude do avião, e o piloto apenas controlava esse dispositivo – em outras palavras, acontecia um laço de feedback (retroalimentação) entre o piloto (que “dizia” à máquina o que fazer) e o avião (que ajustava as coordenadas de acordo com aquilo que o piloto pedia).
O governo dos EUA, contudo, não estava interessado apenas na automatização da pilotagem: era essencial que, do solo, os soldados pudessem abater os aviões inimigos – para tanto, saber o posicionamento futuro do avião era primordial. Era como caçar patos: o caçador precisa estabelecer a trajetória da ave para atirar não onde ela está, mas, sim, onde ela estará. Esse problema da “caça aos patos” era amplificado devido à velocidade e altitude das aeronaves durante o combate. Havia, então um loop de feedback: a predição só poderia ser alcançada quando o tempo do voo fosse sabido, mas o tempo do voo dependia do ponto de mira da artilharia antiaérea que, por sua vez, era um output (saída) da predição (em outras palavras, uma coisa alimentava a reação da outra). Em 1930, após alguns protótipos, a Sperry desenvolveu o preditor denominado T-6, um computador que calculava a predição (ou seja, o local onde a aeronave inimiga estará no tempo) e a balística (ou seja, como mirar a arma de modo que a cápsula lançada exploda no momento exato em um ponto no espaço e tempo). Desse modo, a predição e a balística formavam um laço de feedback: os operadores inseriam no preditor dados referentes ao tempo estimado de viagem da cápsula quando avistavam o inimigo; o preditor usava esses dados para enviar cálculos iniciais ao estágio da balística que, por sua vez, refazia os cálculos e retornava a informação atualizada sobre o tempo de voo estimado ao preditor, permitindo o disparo preciso.
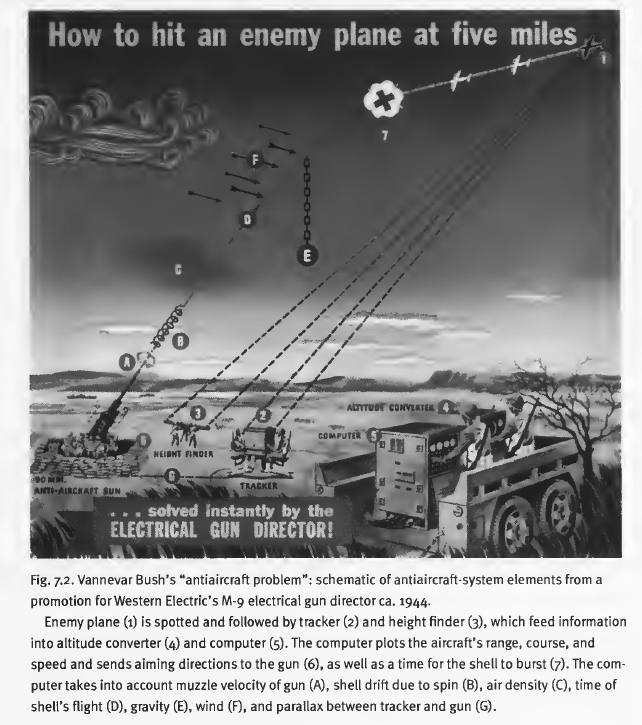
Esquema de elementos presentes em um sistema antiaéreo (note como o disparo e a detonação da munição não seguiam a mesma trajetória do avião inimigo). In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 204.
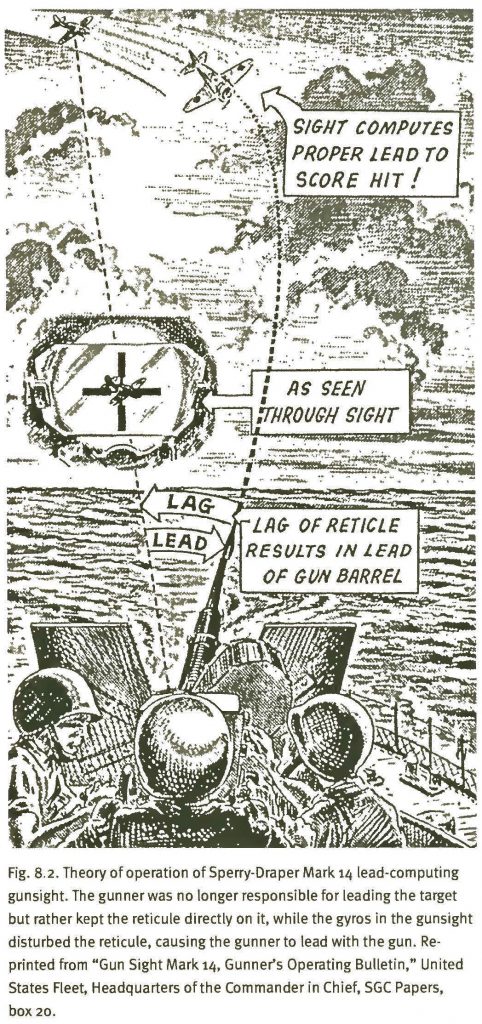
O desenvolvimento da tecnologia antiaérea fez com que houvesse mudanças no modo como os alvos eram rastreados: enquanto o artilheiro mirava o avião inimigo em seu visor (terrestre ou naval), a torreta ajustava-se automaticamente para o local em que o avião estaria no futuro (ocorrendo, então, um lag, ou seja, atraso). In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 204.
Esse vídeo deixa o assunto sobre predição e balísitca um pouco mais claro:
O papel da Sperry Corporation foi fundamental durante a Segunda Guerra Mundial (1939-1945) não apenas no solo: para elaborar armas adaptáveis aos aviões estadunidenses, a empresa contratou, em 1940, o imigrante italiano pintor de afrescos e murais Alfred Crimi, que se tornou responsável pelo design da maioria dos equipamentos da Sperry, incluindo as torretas duplas do avião B-17, posicionadas em uma esfera que girava sobre seu próprio eixo. As ilustrações de Crimi são excepcionalmente belas, como pode ver abaixo:


Em 1942, a empresa Sperry Corporation assinou contrato junto às Forças Armadas para produzir mais de um bilhão de dólares em sistemas de controle. Em 1943, o número de empregados da Sperry chegou a 32 mil pessoas. Entre 1942 e 1945, o valor dos produtos da empresa somaram mais de 1.3 bilhões de dólares.
Para além da artilharia antiaérea da Sperry, outra inovação se mostrou fundamental durante a Segunda Guerra Mundial. Em 1940, os melhores sistemas de radares não eram bons o bastante automatizar o controle de fogo contra um avião inimigo (o NDRC, National Defense Research Committee, fundado pelo presidente Franklin Delano Roosevelt em 27 de junho do mesmo ano) começou a investir para mudar essa situação). RADAR significa radio detection and ranging (detecção e localização por rádio), e seu objetivo principal era determinar distância de um objeto no espaço da estação de radar. Até 1940, os radares dos Aliados e do Eixo operavam com ondas largas, fazendo com que a resolução transmitida pelas antenas fosse muito baixa, uma vez que a distância medida era muito espaçada. Os ataques aéreos alemães aos ingleses fizeram com que os pesquisadores da Universidade de Birmingham, em 1939, desenvolvessem o magnetron de múltiplas cavidades (cavity magnetron). O magnetron passou a ser usado nos radares pois conseguia produzir ondas curtas de 10 centímetros ou até mesmo 3 cm: além de aumentar a resolução de detecção de inimigos, o magnetron permitia, graças ao seu tamanho diminuto, a mobilidade dos radares.
<Acréscimo versão 2019>
É interessante aprofundar a questão dos radares, uma vez que foram decisivos durante a Segunda Guerra Mundial e, atualmente, estão presentes em todos os controles aéreos de tráfego ao redor do mundo. Em 1941, embora os navios de guerra estadunidenses estivessem equipados com as artilharias produzidas, principalmente, pela Sperry Corporation, um ataque inimigo foi capaz de fazer com que as Forças Armadas dos EUA repensassem suas estratégias: os Kamikazes (ou camicases) japoneses eram ataques suicidas rápidos, baixos e imprevisíveis. Causar danos a um avião Kamikaze próximo ao navio de guerra não significava muito, uma vez que ele iria se chocar contra o navio do mesmo modo. Assim, era necessário abater o avião a uma distância segura. Para isso, era preciso desenvolver a tecnologia de radares móveis.
Um pouco antes do ataque Kamikaze à baía naval de Pearl Harbor em 1941, o engenheiro graduado pelo MIT Horatio Rivero foi contratado pelo BuOrd (1940) para liderar, juntamente com Samuel Tucker (o cunhador do termo radar), a equipe de desenvolvimento de tecnologia de radares. Utilizando o recém-importado magnetron britânico, a equipe de Rivero produziu alguns resultados que auxiliaram os estadunidenses na guerra, mas que ainda estavam muito aquém do desejado nos quesitos velocidade e “tiro cego” (ou seja, o radar controlando diretamente as armas para atirar automaticamente durante a noite ou durante neblinas.
Essa situação só começou a mudar em 1943, quando o Laboratório de Radiação do MIT iniciou o programa de desenvolvimento do sistema de controle de fogo Mark 56, um dos últimos contratos do NDRC para esse tipo de dispositivo. O seu radar de escâner cônico com 3 cm de comprimento de onda conseguia buscar, em uma área significativa, por alvos e, ao mesmo tempo, automaticamente rastreá-los, até mesmo em ângulos baixos. Eram necessários dois operadores no diretor no deque para fazer o rastreamento óptico e direcionarem a antena do radar: o processamento dessas variáveis era realizado em um compartimento abaixo do deque. O Mark 56 fazia todos os cálculos em um conjunto interno com um giroscópio que rastreava a linha de visão, enquanto o diretor em si, no deque, era movido por um servomecanismo. Embora bastante avançado tecnologicamente, o Mark 56 nunca chegou a ser utilizado na Segunda Guerra devido ao seu tempo de desenvolvimento. Os primeiros Mark 56 só chegaram à frota estadunidense em 1947, porém, só foram amplamente utilizados (e se tornaram padrão) nos navios da Marinha dos EUA na década de 1970.
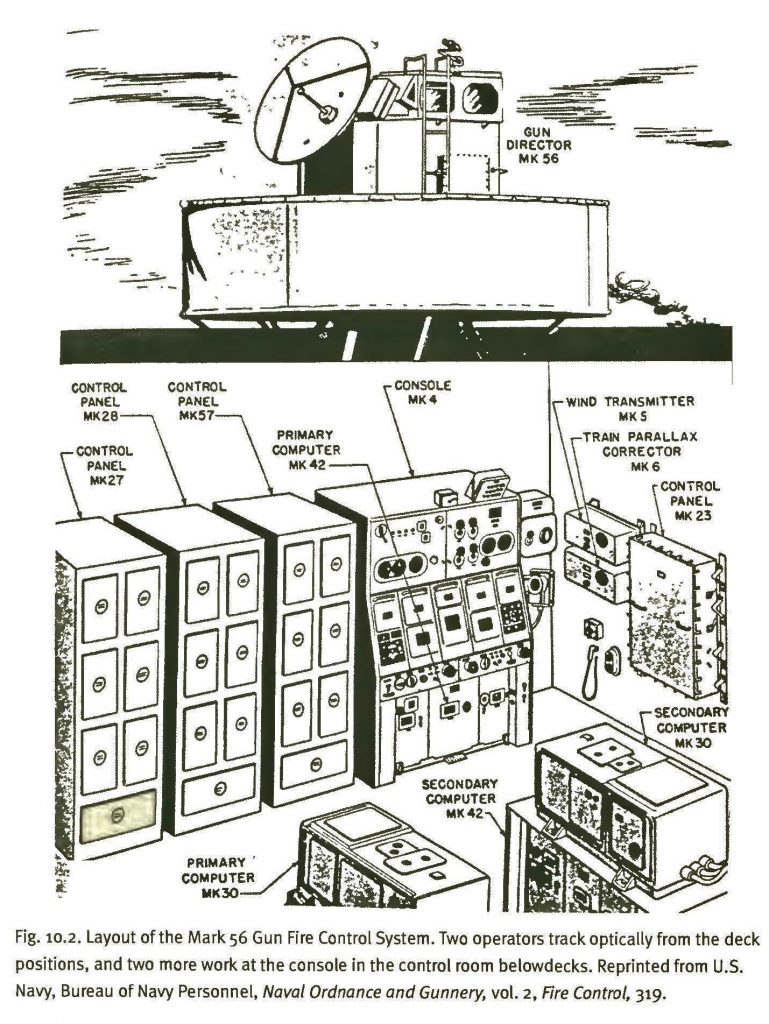
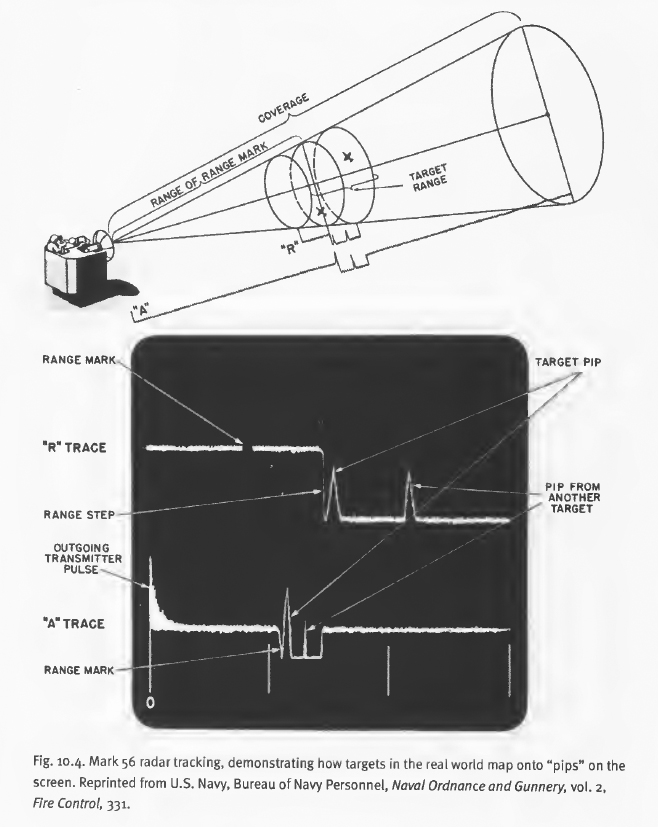
Detalhes de elementos e operação do Mark 56. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, pp. 269, 271.
Quer saber o que havia dentro de um Mark 56? Assista a esse vídeo (note os servomecanismos dentro do dispositivo – o monte de eixos e engrenagens que faziam o trabalho mecânico antes dos componentes eletrônicos):
Para ver os equipamentos em ação, basta rodar o vídeo a seguir:
Os radares móveis também foram utilizados pelo Exército estadunidense durante a Segunda Guerra Mundial. Em 1940, o rastreamento com radar ainda era uma atividade manual: o operador via o dado em uma tela de osciloscópio e utilizava um apontador eletrônico, controlado por um volante, para selecionar o eco no radar que deveria ser o alvo – cabia, assim, aos operadores humanos a filtragem daquilo que era o sinal verdadeiro do inimigo em meio aos ruídos captados pelo radar. Para driblar esse problema, o Laboratório de Radiação do MIT começou a trabalhar em meios de automatizar o rastreamento a fim de eliminar a necessidade de um operador, manualmente, ter de identificar na tela os “pips” advindos dos inimigos.
Para substituir os “pips”, foi desenvolvido um escaneamento cônico, ou seja, a rotação da emissão do radar ao redor do eixo da antena 30 vezes por segundo, formando um cone. Essa emissão giratória podia detectar quando um alvo saia de seu centro e, assim, enviava um sinal de feedback para a antena reposicionar o alvo em seu centro novamente (em outras palavras, a antena conseguia rastrear alvos que se moviam, como aviões). Para movimentar rapidamente a antena, o laboratório do MIT adquiriu servomecanismos da empresa G.E. e, em 1941, realizou, com sucesso os primeiros testes de rastreamento em Boston. Com o aparato funcionando bem, os engenheiros montaram todo o dispositivo sobre um caminhão, para tornar o radar móvel: isso também protegia os operadores de ataques inimigos, bem como das mudanças climáticas que podem ocorrer durante campanhas de batalhas. Esse caminhão foi denominado XT-1.
O sucesso do XT-1 logo fez com que o Exército o padronizasse como o sistema de radar SCR-584, encomendando mais de mil unidades, custando cada uma cerca de $100.000 e pesando 10 toneladas (o sistema era montado em um trailer). Quando chegou aos campos de batalha, o radar trabalhou muito bem: quando um alvo era identificado, o radar conseguia rastreá-lo com acurácia dentro de um raio de 18 milhas (aproximadamente 29 quilômetros). O SCR-584 também foi decisivo para as batalhas em território europeu. Os alemães haviam desenvolvido a “bomba robô” denominada V-1, uma bomba com controle automático de voo que emulava, em sua forma, um pequeno avião. A Alemanha bombardeou Londres, a partir da costa francesa, em junho de 1944, logo após o Dia D, com quase 7.500 bombas V-1. As Forças Armadas britânicas pediram auxílio aos EUA, que enviaram a tecnologia do SCR-584, além de treinamento para os operadores. Surtiu efeito: entre 18 de junho e 17 de julho de 1944, as armas automatizadas pelo SCR-584 derrubaram 343 V-1’s (cerca de 10% do total do ataque).
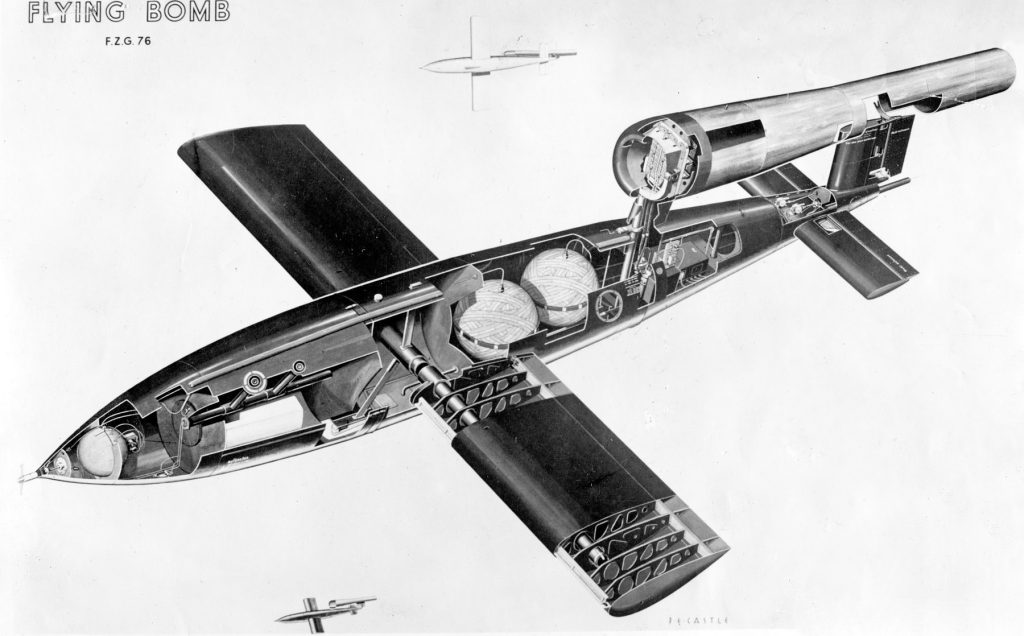
Interior de uma bomba V-1. In: https://en.wikipedia.org/wiki/V-1_flying_bomb
Mesmo bem-sucedido, o SCR-584 apresentava suas limitações. Ele dependia muito de operadores bem treinados para lidar com o rastreamento óptico, uma vez que nem sempre o radar conseguia filtrar os sinais dos alvos de outros ruídos vindos das redondezas ou de alvos muito próximos. Além disso, o radar e os visores ópticos eram montados em diferentes equipamentos: enquanto os radares ficavam dentro do trailer, os rastreadores ópticos ficavam do lado de fora.
Para saber mais sobre os radares de guerra, fica a dica:
</Acréscimo versão 2019>
Leitura recomendada
› MINDELL, David A.. Between human and machine. Feedback, control, and computing before Cybernetics. Baltimore/London: The Johns Hopkins University Press, 2002.
O capítulo 3, intitulado “Taming the beasts of the Machine Age. The Sperry Company”, oferece uma base excelente sobre a atuação da Sperry Corporation junto às Forças Armadas estadunidenses antes e durante a Segunda Guerra Mundial. O capítulo aborda algumas questões técnicas muito interessantes sobre o funcionamento dos sistemas de pilotagem automática e preditores.
 Loading...
Loading...
› RID, Thomas. Rise of the machines. A cybernetic history. New York: W. W. Norton & Company, Inc., 2016.
O capítulo 1, intitulado “Control and communication at war”, oferece um panorama sobre a cibernética pré-Wiener. É um texto mais geral, não focando apenas na Sperry Corporation, incluindo algumas inovações britânicas durante o período da Segunda Guerra Mundial.
Loading...
› Radar Operator’s Manual (RADTHREE), Radar Bulletion n. 3. Washington DC: United States Fleet, Navy Department, 1945.
Esse é para os fortes! O manual apresenta os princípios gerais de funcionamento dos radares e também descreve em pormenores os elementos técnicos de um radar.
Acesse aqui: https://www.ibiblio.org/hyperwar/USN/ref/RADTHREE/index.html
Jogo recomendado
Falamos sobre Cibernética… Falamos sobre as torretas automatizadas do avião B-17… Que tal juntarmos tudo isso na prática?!
B-17 Flying Fortress: The Mighty 8th é um simulador lançado em 2000 para computadores. A curva de aprendizado é um pouco longa, mas vale a pena.
Clique aqui para baixá-lo: Download do jogo.
Filme recomendado
Acredito que um dos melhores filmes sobre essa época de guerras e cibernética seja a cinebiografia de Alan Turing O Jogo da Imitação (The Imitation Game), dirigido por Morten Tyldum em 2014. Computadores são realmente fascinantes, não acha?!
Powerpoint da aula
Aposto que a aula foi tão boa que até se esqueceu de fazer anotações, não é mesmo? Sem problemas!
Clique aqui para baixar o PPT: Download da aula.

Este trabalho está licenciado com uma Licença Creative Commons – Atribuição-NãoComercial 4.0 Internacional.